Das Team
von links: B.Sc. Muhannad Al Chatouri, B.Sc. Alan Cordonnier, B.Sc. Adrian Huerta-Lopez, B.Eng. Benjamin Kleine
Die Idee
Unser Ziel ist die Entwicklung, Konstruktion und Demonstration eines automatisierten Systems zur selbstständigen Reinigung von Stufen. Bisherige Reinigungsroboter sind nur für die Säuberung einzelner Räume und Wohnungsbereiche geeignet, Stufen stellen für sich noch Barrieren dar. Wir haben es uns zur Aufgabe gesetzt einen Roboter zu entwickeln, dem es möglich ist Treppen zu erkennen und zu erklimmen, um diese selbständig zu reinigen.
Dabei sollen die Stufen jedoch nicht auf dem schnellsten Weg überwunden werden, sondern Ziel ist es, dass der Automat auf jeder Stufe verweilt. Dort kann er dann über seitliches Fahren und Saugen die Trittfläche reinigen. Um dabei Hindernisse, wie z.B. eine Treppen(stufe) oder eine Wand zu erkennen, werden Sensoren an verschiedensten Stellen des Roboters eingesetzt. Durch seine Steuerung soll er so fähig sein, Treppen selbständig zu erkennen und zu erklimmen, während er vor Wänden oder zu großen Hindernissen umkehrt.
Das Konzept
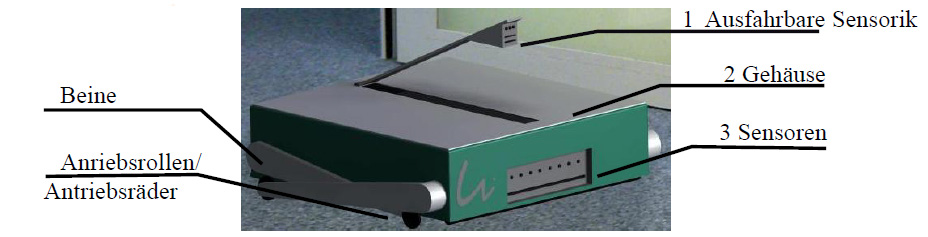
Zur Erkennung der Höhe und des Abstandes zum nächsten Hindernis, werden Sensoren in einer Antenne (1) und an der Vorder-,Hinter- und Unterseite (3) des Roboters angebracht. Die Antenne wird sich zum Treppensteigen aus dem Gehäuse (2) fahren lassen. Wird durch sie eine Stufe erkannt, nutzt der Roboter seine Beine (4) und die an deren Ende angebrachten Rollen (5), um sie zu erklimmen. Die Rollen können ebenfalls in der Ebene für die Vorwärtsbewegung eingesetzt werden.
Motoren, Steuerung sowie die Energieversorgung sollen vollständig im Inneren des
Gehäuses verborgen werden.
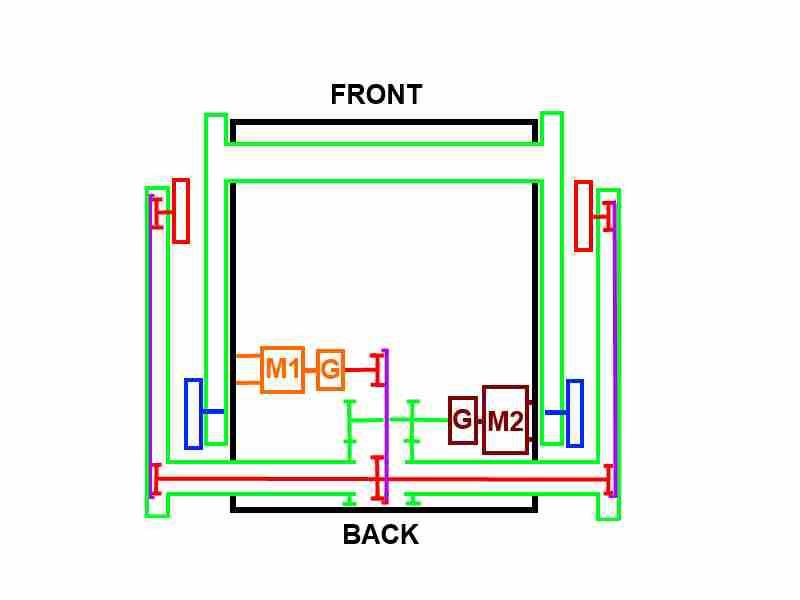
Der Antrieb der Beine soll über eine komplexe Anordnung realisiert werden. Dabei sind sowohl die nach Außen versetzen Beine als auch die am Ende angebrachten Räder von Motoren angetrieben. Das Drehmoment für die Beine wird dabei durch eine Hohlwelle von einem Motor aus übertragen. Um die Räder für die Vorwärtsbewegung antreiben zu können, wird auf eine, im Inneren der Hohlwelle gelagerte Welle zurück gegriffen, welche anschließend über einen Riemen die Kraft auf die Räder überträgt.
Technische Daten
- Motoren + Getriebe
- 1741U006CXR
- 3272G024CR 38A 240:1
- 2642W024CR R26/1S 134:1
- Sensoren
- GP2Y0A21Yk0F!*
- GP2D120XJ00F*
- Microcontroler
*Infrarotsensor